Микроконтроллеры STM32: обмен данными по UART
29 января 2018
В прошлом посте, посвященном STM32, мы познакомились с платами Nucleo, программой STM32CubeMX, узнали, как программировать под STM32 в Linux, а также осилили базовые операции с GPIO. Сегодня же мы поговорим об использовании аппаратной реализации UART. В рамках данного поста мы будем использовать UART исключительно для обмена данными с компьютером. Однако с тем же успехом его можно применять и для взаимодействия с внешними модулями.
Создадим новый проект в STM32CubeMX. Как и в прошлый раз, я буду использовать отладочную плату Nucleo-F411RE, однако для других плат отличия не будут большими.
Во вкладке Pinout находим пины с пометками USART2_RX и USART2_TX — это пины PA2 и PA3. Они уже выбраны, как пины, которые будут использованы для UART, но соответствующая периферия на данный момент отключена. Включить ее можно, найдя в дереве слева USART2 и выбрав Asynchronous в выпадающем списке Mode:
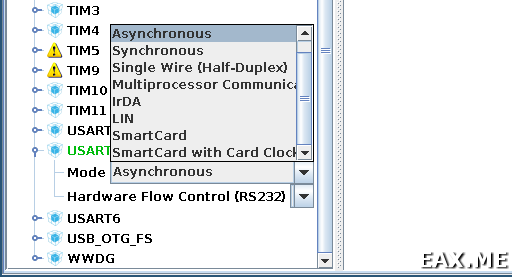
В том же дереве можно заметить периферии USART1 и USART6. Здесь мы используем USART2, так как именно она идет к компьютеру по USB. После включения периферии цвет пинов PA2 и PA3 сменится с желтого на зеленый.
Fun fact! Если в выпадающем списке выбрать Asynchronous, как это сделали мы, то получаем UART, если же выбрать Synchronous, то получим USART. Напомню, что отличие UART от USART заключается в наличии у последнего тактового сигнала (CK). По моим наблюдениям, на практике USART используется не часто.
Дополнительные настройки можно изменить во вкладке Configuration, кликнув на кнопку USART2 в блоке Connectivity. Я изменил Baud Rate на 9600, прочие же настройки оставил без изменений. Затем создаем проект в Project → Generate Code, как делали это в прошлый раз.
Как вы можете помнить, STM32CubeMX генерирует довольно фиговый Makefile. К счастью, можно скопировать Makefile из предыдущего проекта и дописать в список C_SOURCES строчку:
В файле Src/main.c добавляем вызов процедур init() и loop() в окрестностях основного цикла, как делали это в прошлый раз:
/* USER CODE BEGIN WHILE */
init();
while (1)
{
loop();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
… а также добавляем следующий код:
HAL_StatusTypeDef HAL_UART_ReceiveString(
UART_HandleTypeDef *huart, uint8_t *pData,
uint16_t Size, uint32_t Timeout) {
const char newline[] = "\r\n";
const char delete[] = "\x08 \x08";
HAL_StatusTypeDef status;
if(Size == 0)
return HAL_ERROR;
int i = 0;
for(;;) {
status = HAL_UART_Receive(huart, &pData[i], 1, Timeout);
if(status != HAL_OK)
return status;
if((pData[i] == '\x08')||(pData[i] == '\x7F')) { // backspace
if(i > 0) {
status = HAL_UART_Transmit(huart, (uint8_t*)delete,
sizeof(delete)-1, Timeout);
if(status != HAL_OK)
return status;
i--;
}
continue;
}
if((pData[i] == '\r') || (pData[i] == '\n')) {
pData[i] = '\0';
status = HAL_UART_Transmit(huart, (uint8_t*)newline,
sizeof(newline)-1, Timeout);
if(status != HAL_OK)
return status;
break;
}
// last character is reserved for '\0', ignore
if(i == (Size-1))
continue;
status = HAL_UART_Transmit(huart, &pData[i], 1, Timeout);
if(status != HAL_OK)
return status;
i++;
}
return HAL_OK;
}
void error(void) {
HAL_Delay(HAL_MAX_DELAY);
}
void init(void) {
const char ready[] = "Ready!\r\n";
HAL_UART_Transmit(&huart2, (uint8_t*)ready,
sizeof(ready)-1, HAL_MAX_DELAY);
}
void loop(void) {
HAL_StatusTypeDef status;
const char question[] = "What is your name?\r\n";
char answer[256];
char name[32];
status = HAL_UART_Transmit(&huart2, (uint8_t*)question,
sizeof(question)-1, HAL_MAX_DELAY);
if(status != HAL_OK)
error();
status = HAL_UART_ReceiveString(&huart2, (uint8_t*)name,
sizeof(name), HAL_MAX_DELAY);
if(status != HAL_OK)
error();
int code = snprintf(answer, sizeof(answer),
"Hello, %s!\r\n", name);
if(code < 0)
error();
status = HAL_UART_Transmit(&huart2, (uint8_t*)answer,
strlen(answer), HAL_MAX_DELAY);
if(status != HAL_OK)
error();
HAL_Delay(100);
}
/* USER CODE END 0 */
Код не сложный. Процедура HAL_UART_Receive принимает данные, а процедура HAL_UART_Transmit — передает. Все остальное представляет собой мою обвязку вокруг этих двух процедур для создания диалогового режима.
Остается только сказать:
… и попытаться поговорить с платой по UART, воспользовавшись, например, утилитой screen:
Интересно, что скажет нам Nucleo?
What is your name?
Aleksander
Hello, Aleksander!
What is your name?
...
Полную версию исходного кода вы найдете на GitHub. Как видите, работать с UART оказалось весьма просто. Вооружившись полученными сегодня знаниями, мы можем использовать в проектах на базе STM32 радиомодуль HC-12, а также GSM, GPS, Bluetooth, да и вообще произвольный модуль, использующий UART. Стоит, правда, отметить, что мы не рассмотрели использование UART совместно с прерываниями и DMA, но это уже темы для отдельных заметок.
Дополнение: Пример работы с I2C вы найдете в заметках о работе с экранчиком 1602 с I2C-адаптером и внешним EEPROM, а пример работы с SPI — в посте, посвященном SPI flash.
Метки: STM32, Электроника.
Вы можете прислать свой комментарий мне на почту, или воспользоваться комментариями в Telegram-группе.