Как я собирал свой первый квадрокоптер на базе PixHawk
После успешных экспериментов с радиоуправляемым гусеничным роботом и робо-рукой MeArm мне захотелось собрать что-то посложнее. Например, что-то летающее. Оказалось, что авиамоделизм – это просто огромное направление. Собирают и самолеты, и вертолеты, и мультикоптеры. Если взять даже одни только мультикоптеры, то их десяток разных видов помножить на разные размеры и решаемые задачи (гонки, фотосъемка, полеты по GPS, ...). Было решено начать с классического квадрокоптера среднего размера с возможностью дальнейшего апгрейда. В общем, чтобы можно было со всем немного поиграться.
С чего начать
Ниже я не стану подробно описывать из чего обычно состоит квадрокоптер или на какие характеристики двигателей, пропеллеров, регуляторов скорости и прочих частей следует обращать внимание. Во-первых, эта тема на несколько довольно больших статей. Во-вторых, об этом уже написаны хорошие статьи и даже несколько книг. Лично я прочитал следующие книги:
- Твой первый квадрокоптер. Теория и практика;
- Дроны с нуля (Make: Getting Started with Drones);
Эти книги оказались вполне взаимозаменяемыми. Можете прочитать одну любую из них. Также рекомендую серию статей о квадрокоптерах на customelectronics.ru, это суммарно где-то 70 страниц в A4.
Ознакомившись с теорией, имеет смысл полетать по квартире, а затем и на улице, на готовом дешевом мини-квадрокоптере типа Syma X12S Nano. Мини-дроны практически неубиваемые и, в отличие от более крупных DIY дронов, их можно запускать в доме. Упражнения на них позволят вам выработать моторику для управления квадрокоптером, поднакопить опыта, и избежать аварий в будущем. Когда я первый раз запускал такой мини-квадрокоптер, его через пару минут унесло за крышу стоящего рядом двухэтажного дома, где он пропал из зоны видимости и разбился. К счастью, потом я умудрился его найти и ему ничего не было. Но было бы обидно и крайне небезопасно для людей / машин / окон поблизости, если бы это был куда более тяжелый и дорогой DIY дрон!
Заметьте, что в разных странах разное законодательство в отношении того, где и когда можно летать, требуется ли регистрация дронов, и так далее. Если вы живете в Москве, обратите внимание, что территория внутри МКАД является бесполетной зоной. Чтобы спокойно полетать и при этом вас гарантированно никто не трогал, лучше всего вообще выехать куда-нибудь за город. Кстати, мини-дронов это не касается. В общем, ознакомьтесь с местным законодательством. Далее на этом вопросе я предпочитаю не останавливаться, так как законы в отношении дронов, ровно как и соблюдение людьми этих законов на практике, везде разные.
Интересно, что названные выше книги уже сейчас заметно устарели, и еще сильнее устареют к моменту, когда вы будете читать эти строки. В мире авиамоделизма новые (более легкие, надежные и дешевые) компоненты появляются достаточно быстро. Поэтому прежде, чем приступить к сборке своего дрона, крайне рекомендую посетить тематический форум и спросить там совета по подбору компонентов. Я лично затусил на forum.rcdesign.ru. Там есть специальная тема «Вопросы новичка», в которой на первых порах рекомендуется задавать все вопросы, пока вы не освоитесь на форуме.
Само собой разумеется, вам понадобятся хотя бы базовые знания электроники. Если вы уже во всю паяете DIY проекты на базе какой-нибудь Arduino, значит у вас все хорошо. Если это не так, поиграйтесь для начала с Arduino. Или же, если вам все это не интересно, рассмотрите вариант покупки готового квадрокоптера, например, от компании DJI. Готовые квадрокоптеры стоят примерно столько же, сколько аналогичные DIY дроны. Однако в плане возможности апгрейда, доступности запчастей, получаемого в процессе опыта, да и общего фана DIY дроны субъективно на порядок интереснее.
Список покупок
Все компоненты для квадрокоптера были куплены в магазинах air-hobby.ru и realrc.ru. Те же компоненты могут быть куплены на AliExpress несколько дешевле, но придется ждать доставки из Китая. Обычно она занимает несколько месяцев. Большинство компонентов мне подсказали на уже упомянутом forum.rcdesign.ru.
Fun fact! На самом деле, это второй квадрокоптер, который я пытался собрать. Первый не полетел. Дело в том, что я старался следовать рекомендациям из упомянутых выше книг, но из-за отсутствия опыта не учел ряд тонких моментов. Выбрал устаревшие передатчик с приемником, умеющие только PWM, старую тяжелую раму, уже устаревший полетный контроллер MultiWii, и моторы, которые вообще не предназначены для использования к квадрокоптерах. Перед покупкой чего-либо настоятельно рекомендую проконсультироваться у опытных авиамоделистов на тематических форумах!
Итак, список (UPD: здесь были прямые ссылки на интернет-магазины, но по состоянию на 2023-й год все ссылки протухли, в связи с чем были убраны):
- Полетный контроллер Pixhawk v2.4.8 – 1 шт;
- Популярная рама F450, вес 280 г – 1 шт;
- Нарезанный на небольшие квадратики виброизолятор – 1 шт;
- Плата распределения питания с BEC – 1 шт;
- Регуляторы скорости Sunrise Cicada 20A BB2, вес 7.9 г – 4 шт;
- Моторы EMAX 2213/935kv CW и CCW, 18A, 55 г, тяга до 850 г – по 2 шт каждого типа;
- Комплект из четырех пропеллеров HQProp MR1045 – 1 шт;
- Батарея ONBO 5200mAh 3S 35C-70C, 390 г – 1 шт;
- Пищалка с семисегментными индикаторами на 1-8S – 1 шт;
- Большой комплект термоусадок – 1 шт;
- RadioLink T8FB, передатчик Mode 2 на 8 каналов + приемник с PWM и S.BUS/PPM – 1 шт;
- Аккумулятор для передатчика ONBO 2500mAh 3S 5C – 1 шт;
- Зарядное устройство Hobbyking DC-4S – 1 шт;
- Блок питания 12В, 5А – 1 шт;
Дополнение: Зарядное устройство Hobbyking DC-4S оказалось довольно скверным. Оно сильно греется при зарядке аккумулятора и пищит не переставая, когда аккумулятор полностью заряжен. В итоге я отказался от него в пользу куда более приятного iMAX B6. Также, если вы прочитаете следующую статью из цикла, то узнаете, что в итоге я перешел на аппаратуру RadioLink AT9S, чего и вам желаю.
В списке это не отражено, но некоторые позиции лучше брать с запасом, для запчастей. Пропеллеров можно сразу же брать 2-3 комплекта. Также имеет смысл взять по одному дополнительному мотору каждого типа и запасной регулятор скорости. Заметьте, что моторы крепятся на раму F450 при помощи 16 винтов M3x8. В комплекте с моторами идут винты, но они короче. У меня лично было припасено достаточное количество нужных винтов, но вам их может потребоваться докупить.
Опционально можно взять магнитный балансир пропеллеров, штук 20 пар разъемов PolyMax 3.5 мм, более легкий приемник RadioLink R8FM, имеющий только S.BUS/PPM выход, огнеупорные пакеты для хранения батарей, провода 18AWG и комплект ног для рамы. Но первое время это все вам не потребуется. Если не удается найти эти конкретные компоненты, существуют альтернативы. В частности, подойдет полетный контроллер Naza M Lite. Регуляторы скорости подойдут практически любые с аналогичными характеристиками, но лучше брать известные бренды – Little Bee, Zwt Spider, Afro, Dys и Xrotor. Ну и так далее.
Fun fact! На thingiverse.com доступно множество улучшений для рамы F450, которые можно распечатать на 3D-принтере. В частности, шасси, необходимые при креплении камеры внизу дрона, купол для защиты электроники, и не только. Более того, можно напечатать саму раму F450 (проверено, летает).
По деньгам у меня за все вместе получилось 365$ (по курсу на день покупки), и это с запчастями. Если покупать на AliExpress, выйдет дешевле. Для сравнения, аналогичные дроны от DJI стоят начиная от ~500$, без запчастей. Правда, они идут уже с камерой и GPS, поэтому сравнивать их некорректно.
Стоит отметить, что на AliExpress существуют готовые наборы для сборки квадрокоптера, которые стоят несколько дешевле. Но с ними есть проблемы. Во-первых, они все идут без батарей и зарядного устройства, что нужно учитывать при сравнении цен. Во-вторых, качество использованных в них компонентов, мягко говоря, очень сомнительное, особенно учитывая отзывы в стиле «мне пришел сгоревший регулятор скорости». Наконец, подавляющее большинство таких наборов использует уже устаревшие полетные контроллеры APM (предшественник PixHawk) или даже MultiWii. В общем и целом, есть хорошие шансы, что такой квадрокоптер вообще не полетит. Мне кажется, это один из тех случаев, когда скупой платит дважды.
Fun fact! В PixHawk используется сразу два микроконтроллера STM32 – STM32F427 на базе ядра Cortex-M4 с FPU, а также более простой STM32F103. Последний используется для failsafe.
Общие замечания
По поводу рамы. Не рекомендую брать раму с диагональю больше 450 мм. Это максимум, который можно комфортно размещать на столе (что потребуется при сборке), может поместиться в пакет (для транспортировки) и так далее. Если возьмете более крупную раму, то намучаетесь с ней просто из-за больших габаритов.
При выборе аппаратуры обратите внимание, чтобы приемник умел выдавать PPM или S.BUS сигнал. Современные полетные контроллеры, такие, как PixHawk, поддерживают только их. Более старые аппаратуры могут поддерживать только PWM. Если поддерживается и PWM и PPM, это хорошо. В будущем можно будет легко использовать один из каналов, например, для управления подсветкой.
На вопросе что к чему подключается подробно останавливаться не буду. Там нет ничего сложного и в упомянутых книгах все подробно расписано. Если вы что-то подзабыли, все вопросы легко гуглятся. Например, если вы не помните, куда ставятся CW, а куда CCW моторы, вот, пожалуйста, подробная статья. Если не уверены, куда ESC подключаются к PixHawk, ответ есть в официальной документации. Кроме того, по любому вопросу есть видео на YouTube, а если что-то все равно не понятно, можно спросить на форуме.
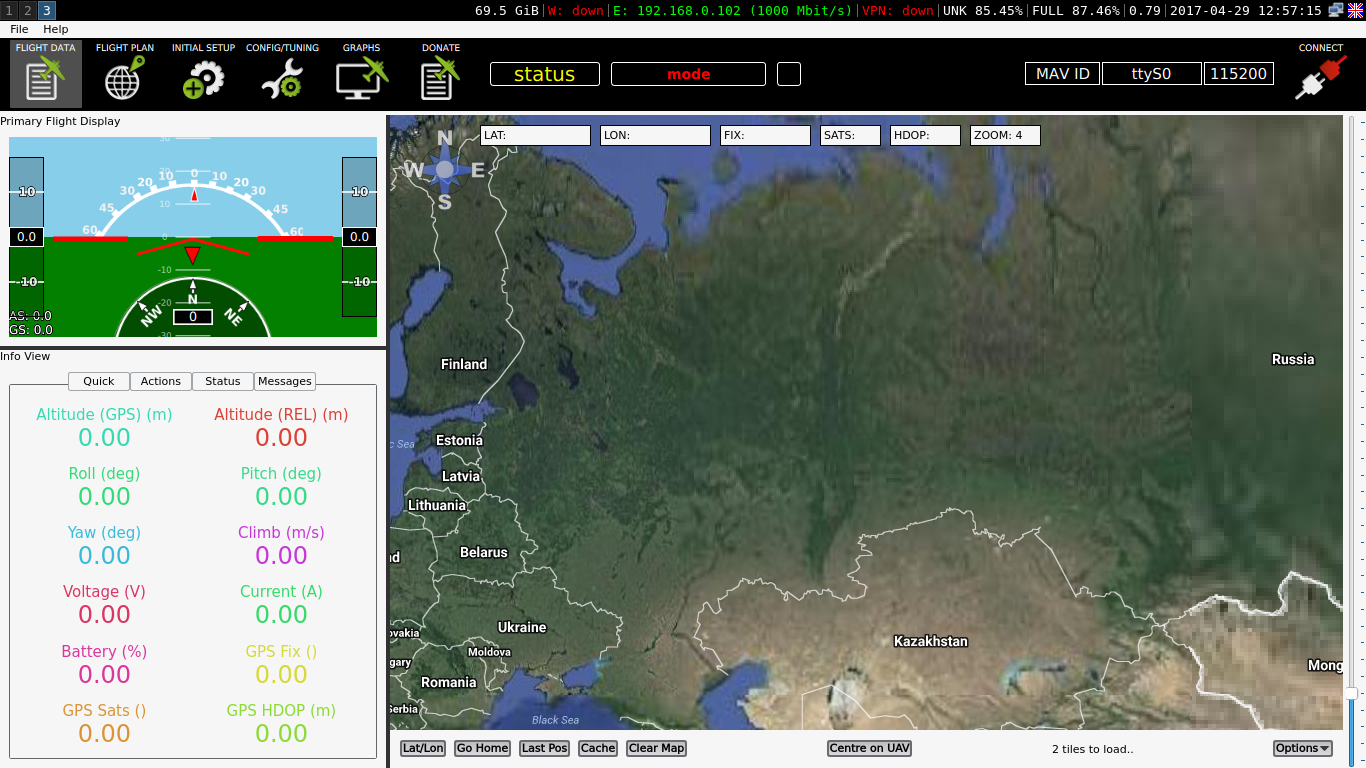
Касаемо настройки PixHawk. Для Windows есть Mission Planner. Для Linux – APM Planner, притом он даже есть в AUR, если вдруг вы пользуетесь Arch Linux на десктопе. Если APM Planner чем-то не подошел, еще есть QGroundControl. Он также работает под MacOS и Android. Настройка элементарная – открываете Initial Setup и по очереди производите настройку в каждом разделе. Программа подробно описывает, что и как нужно делать.
Внешний вид APM Planner (кликабельно, PNG, 606 Кб):
А так выглядит мой квадрокоптер в собранном виде:

Перед первым полетом обязательно убедитесь, что вы (1) откалибровали акселерометр и компас, (2) откалибровали передатчик, (3) откалибровали каналы на стороне полетного контроллера, (4) откалибровали ESC. Моторы к раме и пропеллеры к моторам прикручивайте как можно сильнее. Перед полетом включите квадрокоптер без пропеллеров и убедитесь, что все моторы крутятся (1) в правильную сторону, (2) с одинаковой скоростью и (3) адекватно реагируют на команды с передатчика.
Важно! Очень опасно включать квадрокоптер с пропеллерами дома. Из-за небольшого увеличения throttle дрон может оторваться от пола и улететь прямо в потолок. Категорически запрещается так делать.
Что дальше?
Выше была описана, так сказать, самая базовая модель квадрокоптера, который еще очень долго можно апгрейдить. Много возможностей открывает добавление GPS. Например, удержание позиции и высоты, режим follow me, автоматические полеты по заранее построенному маршруту, автоматический возврат к точке взлета (RTL), и так далее. Другое направление – это фото- и видео-съемка, а также полеты от первого лица (FPV). И это еще не считая добавления подсветки, ультразвукового датчика HC-SR04 (для более точного определения высоты при взлете и посадке), GSM-модуля (например, можно посылать пилоту SMS-сообщение с GPS-координатами дрона при крушении), и так далее.
Не стоит также забывать, что существует совершенно другой класс гоночных квадрокоптеров размером до 250 мм, а также три-, гексо-, октокоптеры и так далее, все это – с бесчисленным сочетанием рам, полетных контроллеров, моторов, регуляторов оборотов и винтов. Кстати, рамы, а также регуляторы оборотов и прочую электронику, можно проектировать самостоятельно. В общем, простор для творчества здесь безграничный.
Дополнение: Прокачиваем квадрокоптер: GPS, FPV и телеметрия